Deep learning: logistic regression
Lviv University
Neurons
Important
ANN \(\equiv\) Artificial Neural Network
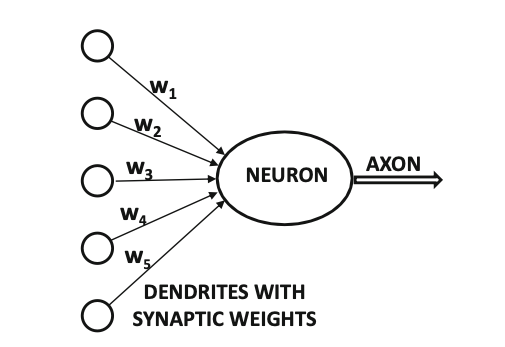
Remember - Neurons, axons, dendrites.
Tip
Inputs to neurons are scaled with weight.
Weight is similar to a strength of synaptic connection.
Neurons
Neurons
Computation
ANN computes a function of the inputs by propagating the computed values from input neurons to output neurons, using weights as intermediate parameters.
Learning
Learning occurs by changing the weights. External stimuli are required for learning in bio-organisms, in case of ANNs they are provided by the training data.
Training
Training data contain input-output pairs. We compare predicted output with annotated output label from training data.
Neurons
Errors
Errors are comparison failures. These are similar to unpleasant feedback modifying synaptic strengths. Goal of changing weights - make predictions better.
Model generalizations
Ability to compute functions of unseen inputs accurately, even though given finite sets of input-output pairs.
Computation graph
Alternative view - computation graph.
When used in basic graph, NNs reduce to classical ML models.
- Least-squares regression
- logistic regression
- linear regression
Nodes compute based on inputs and weights.
Goal
Goal of NN: learn a function that relates inputs to outputs with the use of training examples.
Settings the edge weights is training.
Structure
Consider a simple case of \(d\) inputs and a single binary output. \[ (\overline{X}, y) - \text{training instance} \]
Feature variables: \[ \overline{X}=[x_1, \dots, x_d] \] Observed value: \(y \in {0,1}\), contained in target variable \(y\).
Objective
learn the function \(f(\cdot)\), such that \(y=f_{\overline{W}}(\overline{X})\).
minimize mismatch between \(y\) and \(f_{\overline{W}}(\overline{X})\). \(W\) - weight vector.
In case of perceptron, we compute a linear function: \[\begin{align*} &\hat{y}=f(\overline{X}) = sign\left\{\overline{W}^T \overline{X}^T\right\} = sign\left\{\sum\limits_{i=1}^d w_i x_i\right\} \end{align*}\] \(\hat{y}\) means value, not observed value \(y\).
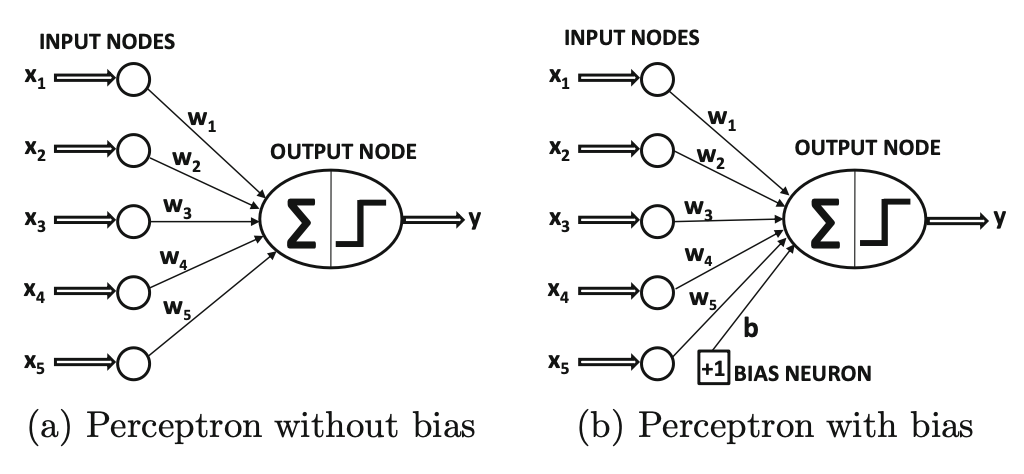
Perceptron
A simplest NN.
Perceptron
We choose the basic form of the function, but strive to find some parameters.
Signis an activation function- value of the node is also sometimes referred to as an
activation.
Perceptron is a single-layer network, as input nodes are not counted.
Perceptron
How does perceptron learn? \[ \overline{W} := \overline{W} + \alpha(y-\hat{y})\overline{X}^T. \] So, in case when \(y \neq \hat{y}\), we can write it as \[ \overline{W} := \overline{W} + \alpha y \overline{X}^T. \]
Perceptron
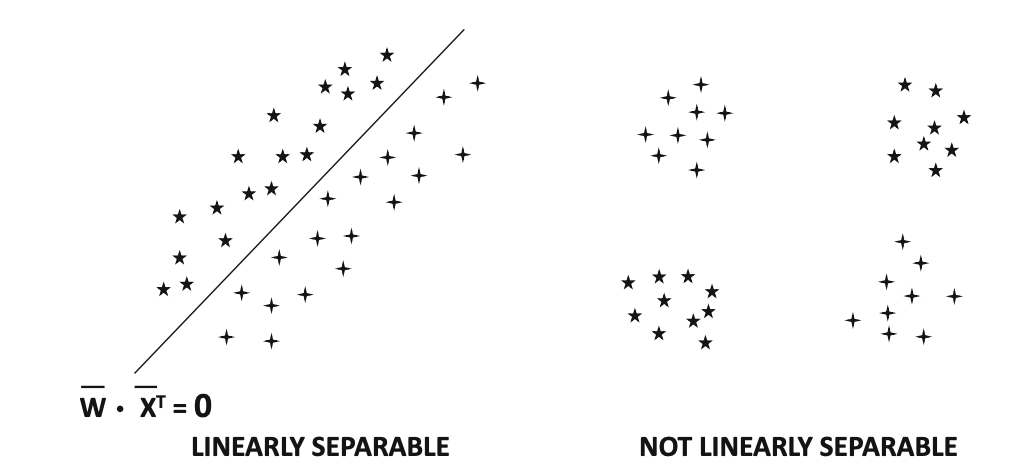
We can show that perceptron works when data are linearly separable by a hyperplane \(\overline{W}^T X = 0\).
Bias
Bias is needed when binary class distribution is imbalanced: \[ \overline{W}^T \cdot \sum_i \overline{X_i}^T \neq \sum_i y_i \] Bias can be incorporated by using a bias neuron.
Problems
In linearly separable data sets, a nonzero weight vector \(W\) exists in which the \(sign(\overline{W}^T X) = sign(y_i)\; \forall (\overline{X}_i,y_i)\).
However, the behavior of the perceptron algorithm for data that are not linearly separable is rather arbitrary.
Loss function
ML algorithms are loss optimization problems, where gradient descent updates are used to minimize the loss.
Original perceptron did not formally use a loss function.
Retrospectively we can introduce it as: \[ L_i \equiv \max\left\{-y_i(\overline{W}^T \overline{X_i}\right\} \]
Loss function
We differentiate: \[\begin{align*} &\dfrac{\partial L_i}{\partial \overline{W}} = \left[\dfrac{\partial L_i}{\partial w_1}, \dots, \dfrac{\partial L_i}{\partial w_d}\right] = \\ & = \begin{cases} -y_i \overline{X_i}, & \text{if } sign\{W^T X_i\} \neq y_i,\\ 0, & \text{otherwise} \end{cases} \end{align*}\]
Perceptron update
Negative of the vector is the direction of the fastest rate of loss reduction, hence perceptron update: \[\begin{align*} &\overline{W} := \overline{W} - \alpha\dfrac{\partial L_i}{\partial \overline{W}} = \overline{W} + \alpha y_i \overline{X_i}^T. \end{align*}\]
Activation functions
A network with weights \(\overline{W}\) and input \(\overline{X}\) will have a prediction of the form \[\begin{align*} &\hat{y}=\Phi\left( \overline{W}^T \overline{X}\right) \end{align*}\] where \(\Phi\) denotes activation function.
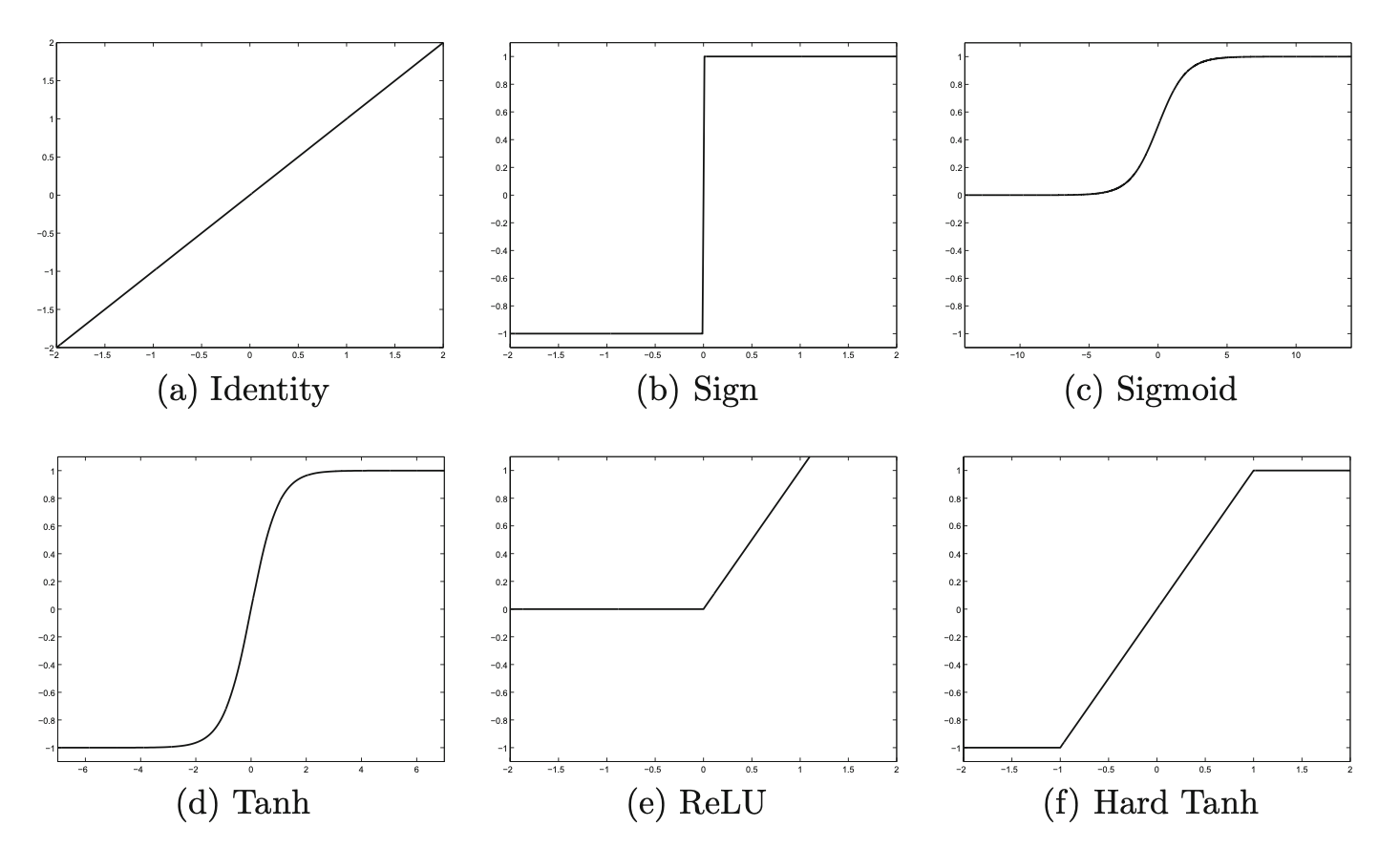
Activation functions
Identity aka linear activation
\[ \Phi(v) = v \]
Sign function
\[ \Phi(v) = sign(v) \]
Activation functions
Sigmoid function
\[ \Phi(v) = \dfrac{1}{1+e^{-v}} \]
tanh
\[ \Phi(v) = \dfrac{e^{2v}-1}{e^{2v}+1} \]
Activation functions
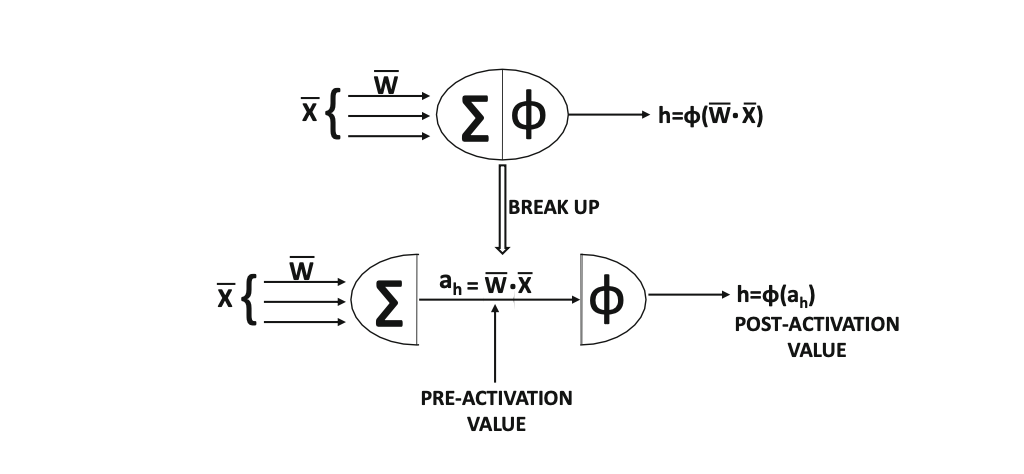
Actually, neuron computes two functions:
Activation functions
We have pre-activation value and post-activation value.
- pre-activation: linear transformation
- post-activation: nonlinear transformation
Activation functions

Activation functions

Activation functions
Two more functions that have become popular recently:
Rectified Linear Unit (ReLU)
\[ \Phi(v) = \max\left\{v, 0\right\} \]
Hard tanh
\[ \Phi(v) = \max\left\{\min\left[v, 1\right], -1 \right\} \]
Multiple activation fns
Activation functions
Properties:
- monotonic
- saturation at large values
- squashing
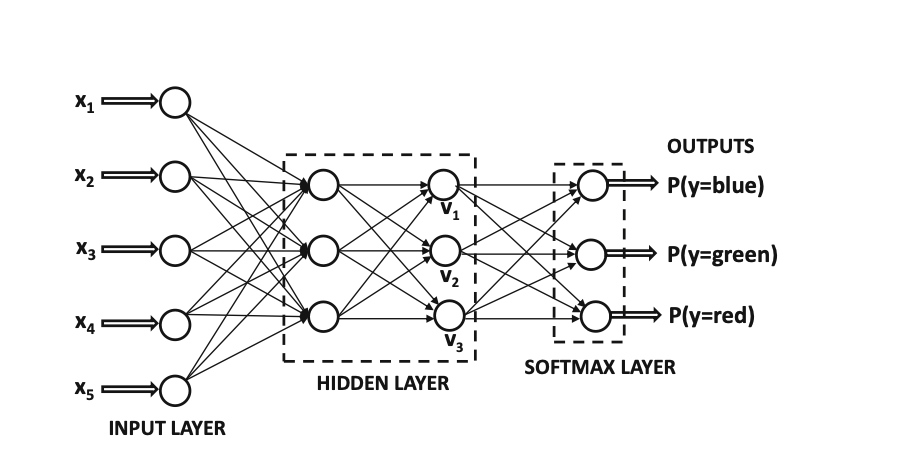
Softmax activation function
Used for k-way classification problems. Used in the output layer.
\[\begin{align*} &\Phi(v)_i = \dfrac{\exp(v_i)}{\sum\limits_{i=1}^k \exp(v_i)}. \end{align*}\]
Softmax layer converts real values to probabilities.
Softmax activation function
Loss functions
Least squares regression, numeric targets
\[\begin{align*} &L(\hat{y}, y) = (y-\hat{y})^2 \end{align*}\]
Logistic regression, binary targets
\[\begin{align*} &L(\hat{y}, y) = -\log \left|y/2 - 1/2 + \hat{y}\right|, \{-1,+1\} \end{align*}\]
Multinomial logistic regression, categorical targets
\[\begin{align*} &L(\hat{y}, y) = -\log (\hat{y}_r) \text{ - cross-entropy loss} \end{align*}\]
Multilayer networks
Multilayer networks
Suppose NN contains \(p_1, \dots, p_k\) units in each of its \(k\) layers.
Then column representations of these layers, denoted by \(\overline{h}_1, \dots, \overline{h}_k\), have \(p_1, \dots, p_k\) units.
Weights between input layer and first hidden layer: matrix \(W_1\), sized \(p_1 \times d\).
Weights between \(r\)-th layer and \(r+1\)-th layer: matrix \(W_r\) sized \(p_{r+1}\times p_r\).
Multilayer networks
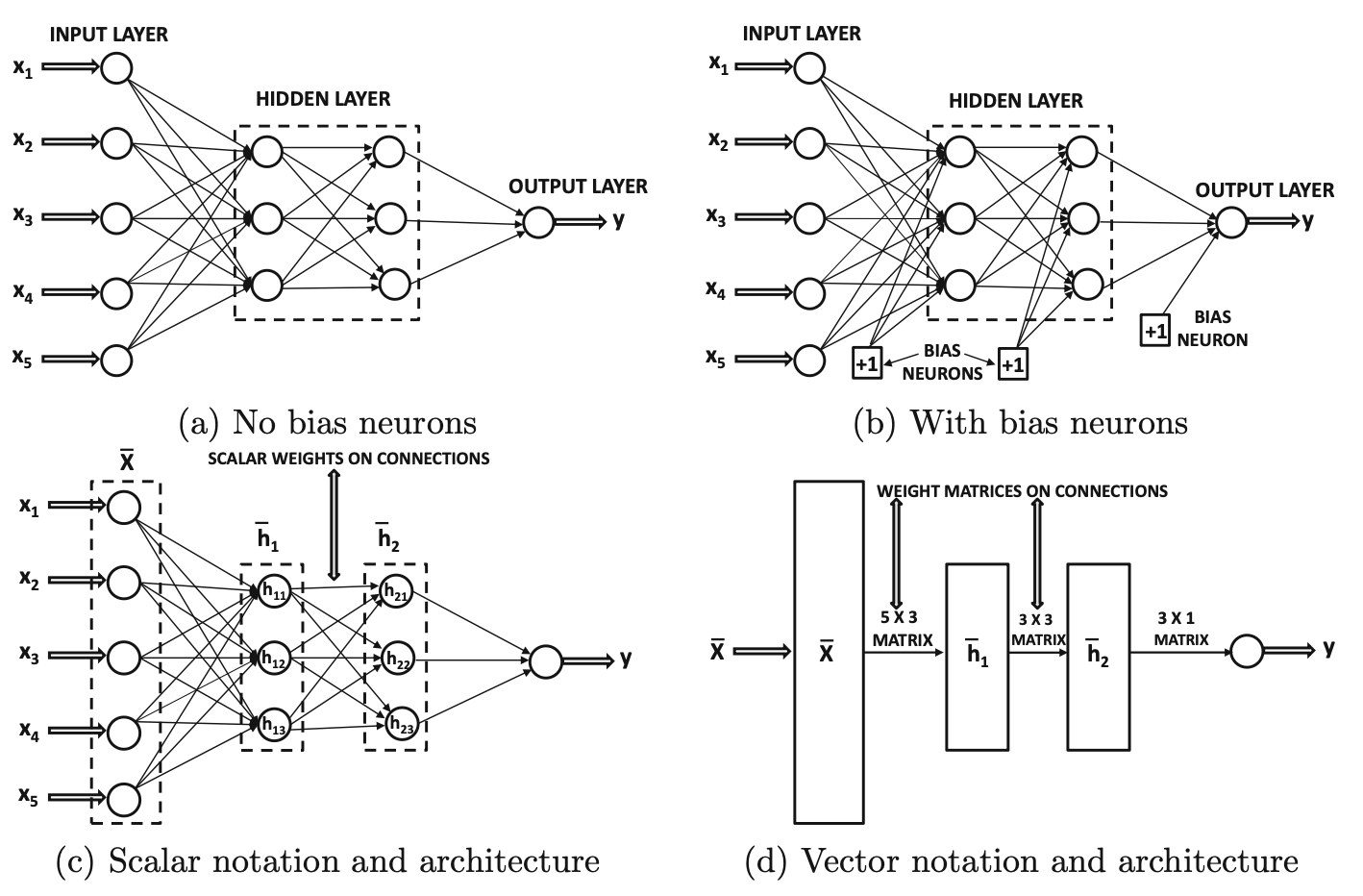
Multilayer networks
Therefore, a \(d\)-dimensional input vector \(\overline{x}\) is transformed into the outputs using these equations: \[\begin{align*} &\overline{h}_1 = \Phi(W_1^T x),\\ &\overline{h}_{p+1} = \Phi(W_{p+1}^T \overline{h}_p), \forall p \in \left\{1 \dots k-1 \right\} \\ &\overline{o} = \Phi(W_{k+1}^T \overline{h}_k) \end{align*}\] Activation functions operate on vectors and are applied element-wise.
Multilayer networks
Definition (Aggarwal)
A multilayer network computes a nested composition of parameterized multi-variate functions.
The overall function computed from the inputs to the outputs can be controlled very closely by the choice of parameters.
The notion of learning refers to the setting of the parameters to make the overall function consistent with observed input-output pairs.
Multilayer networks
Input-output function of NN is difficult to express explicitly. NN can also be called universal function approximators.
Universal approximation theorem
Given a family of neural networks, for each function \(\displaystyle f\) from a certain function space, there exists a sequence of neural networks \(\phi_1,\phi_2,\dots\) from the family, such that \(\phi_{n} \to f\) according to some criterion.
In other words, the family of neural networks is dense in the function space.
Nonlinear activation functions
Theorem. A multi-layer network that uses only the identity activation function in all its layers reduces to a single-layer network.
Proof. Consider a network containing \(k\) hidden layers, therefore containing a total of \((k+1)\) computational layers (including the output layer).
The corresponding \((k+1)\) weight matrices between successive layers are denoted by \(W_1 ...W_{k+1}\).
Nonlinear activation functions
Let:
- \(\overline{x}\) be the \(d\)-dimensional column vector corresponding to the input
- \(\overline{h_1},\dots,\overline{h_k}\) be the column vectors corresponding to the hidden layers
- and \(\overline{o}\) be the \(m\)-dimensional column vector corresponding to the output.
Nonlinear activation functions
Then, we have the following recurrence condition for multi-layer networks: \[\begin{align*} &\overline{h_1} = \Phi(W_1 x) = W_1 x,\\ &\overline{h}_{p+1} = \Phi(W_{p+1} \overline{h}_p) = W_{p+1}\overline{h}_p \;\; \forall p \in \left\{1 \dots k−1\right\}, \\ &\overline{o} = \Phi(W_{k+1} \overline{h}_k) = W_{k+1} \overline{h}_k. \end{align*}\]
Nonlinear activation functions
In all the cases above, the activation function \(\Phi(\cdot)\) has been set to the identity function. Then, by eliminating the hidden layer variables, we obtain the following: \[\begin{align*} &\overline{o} = W_{k+1}W_k \dots W_1 \overline{x} \end{align*}\] Denote \(W_{xo}=W_{k+1}W_k \dots W_1\).
Note
One can replace the matrix \(W_{k+1}W_k \dots W_1\) with the new \(d\times m\) matrix \(W_{xo}\), and learn the coefficients of \(W_{xo}\) instead of those of all the matrices \(W_1, W_2, \dots W_{k+1}\), without loss of expressivity.
Nonlinear activation functions
In other words, we have the following: \[\begin{align*} &\overline{o} = W_{xo} \overline{x} \end{align*}\] However, this condition is exactly identical to that of linear regression with multiple outputs. Therefore, a multilayer neural network with identity activations does not gain over a single-layer network in terms of expressivity.
Linearity observation
The composition of linear functions is always a linear function. The repeated composition of simple nonlinear functions can be a very complex nonlinear function.
Backpropagation
DAG Definition
A directed acyclic computational graph is a directed acyclic graph of nodes, where each node contains a variable. Edges might be associated with learnable parameters.
A variable in a node is either fixed externally (for input nodes with no incoming edges), or it is a computed as a function of the variables in the tail ends of edges incoming into the node and the learnable parameters on the incoming edges.
DAG is a more general version of NN.
Backpropagation
A computational graph evaluates compositions of functions.
A path of length 2 in a computational graph in which the function \(f(\cdot)\) follows \(g(\cdot)\) can be considered a composition function \(f(g(\cdot))\).
In case of sigmoid function: \[\begin{align*} &f(x) = g(x) = \dfrac{1}{1+e^{-x}} \\ &f(g(x)) = \dfrac{1}{1 + e^{\left[-\dfrac{1}{1+e^{-x}}\right]}} \end{align*}\]
Backpropagation
Important
The inability to easily express the optimization function in closed form in terms of the edge-specific parameters (as is common in all machine learning problems) causes difficulties in computing the derivatives needed for gradient descent.
Example
For example, if we have a computational graph which has 10 layers, and 2 nodes per layer, the overall composition function would have \(2^{10}\) nested “terms”.
Backpropagation
- Derivatives of the output with respect to various variables in the computational graph are related to one another with the use of the chain rule of differential calculus.
- Therefore, the chain rule of differential calculus needs to be applied repeatedly to update derivatives of the output with respect to the variables in the computational graph.
- This approach is referred to as the backpropagation algorithm, because the derivatives of the output with respect to the variables close to the output are simpler to compute (and are therefore computed first while propagating them backwards towards the inputs).
Derivatives are computed numerically, not algebraically.
Backpropagation
Forward phase
- Use the attribute values from the input portion of a training data point to fix the values in the input nodes.
- Select a node for which the values in all incoming nodes have already been computed and apply the node-specific function to also compute its variable.
- Repeat the process until the values in all nodes (including the output nodes) have been computed.
- Compute loss value if the computed and observed values mismatch.
Backpropagation
Backward phase
- Compute the gradient of the loss with respect to the weights on the edges.
- Derivatives of the loss with respect to weights near the output (where the loss function is computed) are easier to compute and are computed first.
- The derivatives become increasingly complex as we move towards edge weights away from the output (in the backwards direction) and the chain rule is used repeatedly to compute them.
- Update the weights in the negative direction of the gradient.
Single cycle through all training points is an epoch.
Logistic Regression as a Neural Network
Inputs
Logistic regression is an algorithm for binary classification.
\(x \in \mathbb{R}^{n_x}, y \in \{0,1\}\).
\(\left\{(x^{(1)},y^{(1)}), ...(x^{(m)}, y^{(m)})\right\}\)- \(m\) training examples.
\(X\) matrix - \(m\) columns and \(n_x\) rows.
\[\begin{align*} &X = \begin{bmatrix} \vdots & \vdots & \dots & \vdots \\ x^{(1)} & x^{(2)} & \dots & x^{(m)} \\ \vdots & \vdots & \dots & \vdots \end{bmatrix} \end{align*}\]
\[ Y = \left[y^{(1)}, y^{(2)}, \dots, y^{(m})\right] \]
Logistic Regression
\(X \in \mathbb{R}^{n_x,m}\).
Using Numpy syntax:
\(Y \in \mathbb{R}^{1,m}\).
Using Numpy syntax:
Logistic Regression
Goal
We will strive to maximize \(\hat{y} = P(y=1 | x)\), where \(x \in \mathbb{R}^{n_x}\).
Obviously, \(0 \leq \hat{y} \leq 1\).
Important
If doing linear regresssion, we can try \[ \hat{y}=w^T x + b. \]
But for logistic regression, we do \[ \hat{y}=\sigma(w^T x + b)$, \; \text{where }\; \sigma=\dfrac{1}{1+e^{-z}}. \]
Parameters
Input
\[ w \in \mathbb{R}^{n_x},\\ b \in \mathbb{R}. \]
Output
\[ \hat{y} = \sigma\left( w^T x + b\right), \]
\[ z \equiv w^T x + b. \]
\(w\) - weights, \(b\) - bias term (intercept)
Graphs
\(\sigma=\dfrac{1}{1+e^{-z}}\).
Loss function
For every \(\left\{(x^{(1)},y^{(1)}), ...(x^{(m)}, y^{(m)})\right\}\), we want to find \(\hat{y}^{(i)} \approx y^{(i)}\). \[\begin{align*} &\hat{y}^{(i)} = \sigma\left(w^T x^{(i)} + b\right) \end{align*}\] We have to define a loss (error) function - this will estimate our model.
Loss function
Quadratic
\[ L(\hat{y}, y) = \dfrac{1}{2}\left(\hat{y}-y)\right)^2. \]
Log
\[ L(\hat{y}, y) = -\left((y\log(\hat{y}) + (1 - y)\log(1 - \hat{y}))\right). \]
Cost function
Why does it work well?
Consider \(y=0\) and \(y=1\).
\[\begin{align*} &y=1: P(y | x) = \hat{y},\\ &y=0: P(y | x) = 1-\hat{y} \end{align*}\]
We select \(P(y|x) = \hat{y}^y(1-\hat{y})^{(1-y)}\).
\[ \log P(y|x) = y\log(\hat{y}) + (1-y)\log(1-\hat{y}) = -L(\hat{y}, y). \]
\[\begin{align*} y=1:& L(\hat{y},y) = -\log(\hat{y}),\\ y=0:& L(\hat{y},y) = -\log(1-\hat{y}) \end{align*}\]
Cost function
Cost function show how well we’re doing across the whole training set: \[\begin{align*} &J(w, b) = \dfrac{1}{m} \sum\limits_{i=1}^m L(\hat{y}^{(i)}, y^{(i)}) = \\ & = -\dfrac{1}{m} \sum\limits_{i=1}^m \left[y\log(\hat{y}) + (1 - y)\log(1 - \hat{y})\right]. \end{align*}\]
Cost function
On \(m\) examples: \[\begin{align*} &\log P(m \dots) = \log \prod_{i=1}^m P(y^{(i)} | x^{(i)}) = \\ & = \sum\limits_{i=1}^m \log P(y^{(i)} | x^{(i)}) = -\sum\limits_{i=1}^m L(\hat{y}^{(i)}, y^{(i)}). \end{align*}\]
Gradient descent
Problem
Minimization problem: find \(w,b\) that minimize \(J(w,b)\).
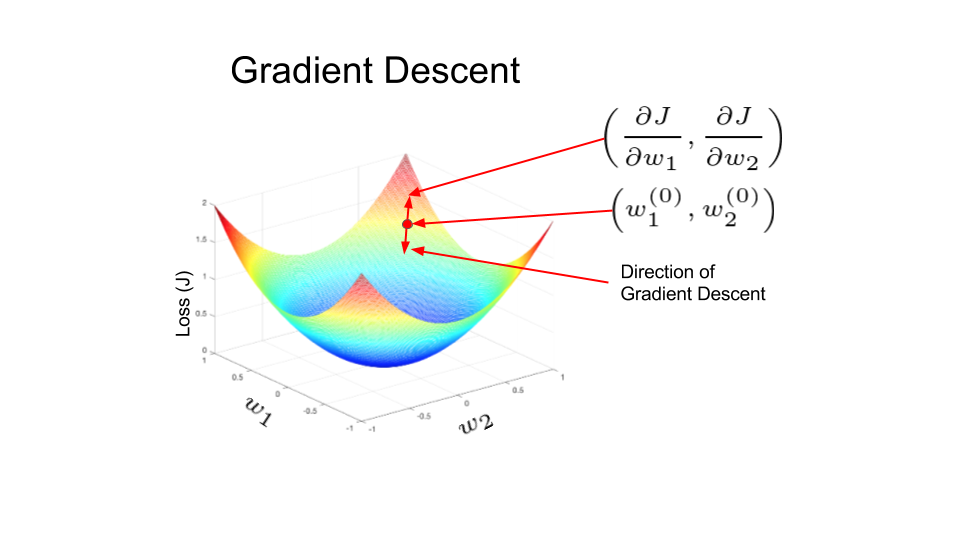
Gradient descent
- We use \(J(w,b)\) because it is convex.
- We pick an initial point - anything might do, e.g. 0.
- Then we take steps in the direction of steepest descent.
\[ w := w - \alpha \frac{d J(w,b)}{dw}, \\ b := b - \alpha \frac{d J(w,b)}{db} \]
\(\alpha\) - learning rate
Gradient descent
- forward pass: compute output
- backward pass: compute derivatives
Logistic Regression Gradient Descent
\[\begin{align*} &z = w^T x + b ,\\ &a \equiv \hat{y} = \sigma(z),\\ &L(a,y) = -\left[y\log(a) + (1 - y)\log(1 - a)\right]. \end{align*}\]
So, for \(n_x=2\) we have a computation graph:
\((x_1,x_2,w_1,w_2,b)\) \(\rightarrow\) \(z =w_1 x_1+w_2 x_2 + b\) \(\rightarrow\) \(\hat{y}=a=\sigma(z)\) \(\rightarrow\) \(L(a,y)\).
Computation graph
Let’s compute the derivative for \(L\) by a: \[\begin{align*} &\frac{dL}{da} = -\dfrac{y}{a} + \dfrac{1-y}{1-a},\\ &\frac{da}{dz} = a(1-a). \end{align*}\]
Computation graph
After computing, we’ll have \[\begin{align*} &dz \equiv \dfrac{dL}{dz} = \dfrac{dL}{da}\dfrac{da}{dz} = a-y,\\ &dw_1 \equiv \frac{dL}{dw_1} = x_1 dz,\\ &dw_2 \equiv \frac{dL}{dw_2} = x_2 dz, \\ &db \equiv \frac{dL}{db} = dz. \end{align*}\]
Logistic Regression Gradient Descent
GD steps are computed via \[\begin{align*} &w_1 := w_1 - \alpha \frac{dL}{dw_1},\\ &w_2 := w_2 - \alpha \frac{dL}{dw_2},\\ &b := b - \alpha \frac{dL}{db}. \end{align*}\]
Logistic Regression Gradient Descent
Consider now \(m\) examples in the training set.
Let’s recall the definition of the cost function: \[\begin{align*} &J(w,b) = \dfrac{1}{m}\sum\limits_{i=1}^{m} L(a^{(i)}, y^{(i)}, \\ &a^{(i)} = \hat{y}^{(i)}=\sigma(w^T x^{(i)} + b). \end{align*}\] And also \[ \frac{dJ}{dw_1} = \frac{1}{m}\sum\limits_{i=1}^{m}\frac{dL(a^{(i)}, y^{(i)})}{dw_1}. \]
Logistic Regression Gradient Descent
Let’s implement the algorithm. First, initialize \[ J=0,\\ dw_1=0,\\ dw_2=0,\\ db=0 \]
Logistic Regression Gradient Descent
for i=1 to m \[\begin{align*}
&z^{(i)} = w^T x^{(i)} + b, \\
&a^{(i)} = \sigma(z^{(i)}), \\
&J += -\left[y^{(i)} \log a^{(i)} + (1-y^{(i)}) \log(1-a^{(i)})\right], \\
&dz^{(i)} = a^{(i)} - y^{(i)}, \\
&dw_1 += x_1^{(i)} dz^{(i)},\\
&dw_2 += x_2^{(i)} dz^{(i)},\\
&db += dz^{(i)}.
\end{align*}\]
Logistic Regression Gradient Descent
Then compute averages:
\[ J = \dfrac{J}{m}, \\ dw_1 = \dfrac{dw_1}{m}, \; dw_2 = \dfrac{dw_2}{m}, \\ db = \dfrac{db}{m}. \]
GD step
\[ w_1 := w_1 - \alpha dw_1,\\ w_2 := w_2 - \alpha dw_2,\\ b := b - \alpha db. \]
Vectorization
We only have 2 features \(w_1\) and \(w_2\), so we don’t have an extra for loop. Turns out that for loops have a detrimental impact on performance.
Vectorization techniques exist for this purpose - getting rid of for loops.
Vectorization
Programming guideline - avoid explicit for loops. \[\begin{align*} &u = Av,\\ &u_i = \sum_j\limits A_{ij} v_j \end{align*}\] To be replaced by
Vectorization
Another example. Let’s say we have a vector \[\begin{align*} &v = \begin{bmatrix} v_1 \\ \vdots \\ v_n \end{bmatrix}, u = \begin{bmatrix} e^{v_1},\\ \vdots \\ e^{v_n} \end{bmatrix} \end{align*}\] A code listing is
So we can modify the above code to get rid of for loops (except for the one for \(m\)).
Vectorizing logistic regression
Let’s examine the forward propagation step of LR. \[\begin{align*} &z^{(1)} = w^T x^{(1)} + b,\\ &a^{(1)} = \sigma(z^{(1)}), \end{align*}\]
\[\begin{align*} &z^{(2)} = w^T x^{(2)} + b,\\ &a^{(2)} = \sigma(z^{(2)}). \end{align*}\]
Vectorizing logistic regression
Let’s recall what have we defined as our learning matrix: \[ X = \begin{bmatrix} \vdots & \vdots & \dots & \vdots \\ x^{(1)} & x^{(2)} & \dots & x^{(m)} \\ \vdots & \vdots & \dots & \vdots \end{bmatrix} \]
Vectorizing logistic regression
Next \[ Z = [z^{(1)}, \dots, z^{(m)}] = w^T X + [b, b, \dots, b] =\\ = [w^T x^{(1)}+b, \dots, w^T x^{(m)}+b]. \]
\[ A = \left[a^{(1)}, \dots, a^{(m)}\right] = \sigma\left(Z\right) \]
Vectorizing logistic regression
Earlier on, we computed \[\begin{align*} &dz^{(1)} = a^{(1)} - y^{(1)}, dz^{(2)} = a^{(2)} - y^{(2)}, \dots \end{align*}\]
We now define \[\begin{align*} &Y = [y^{(1)}, \dots, y^{(m)}],\\ &dZ = [dz^{(1)}, \dots, dz^{(m)}] =\\ &= A-Y = [a^{(1)}-y^{(1)}, \dots, a^{(m)}-y^{(m)}] \end{align*}\]
Vectorizing logistic regression
For \(db\) we have \[\begin{align*} &db = \frac{1}{m}np.sum(dZ),\\ &dw = \frac{1}{m}X dZ^T = \\ & \frac{1}{m}\begin{bmatrix} \vdots & & \vdots \\ x^{(1)} & \dots & x^{(m)} \\ \vdots & & \vdots \\ \end{bmatrix} \begin{bmatrix} dz^{(1)} \\ \vdots\\ dz^{(m)} \end{bmatrix} = \\ & = \frac{1}{m}\left[x^{(1)}dz^{(1)} + \dots +x^{(m)}dz^{(m)}\right]. \end{align*}\]
Vectorizing logistic regression
Now we can go back to the backward propagation algorithm again.
Multiple iterations of GD will still require a for loop.